Два инженера-робототехника построили действующий прототип робота TARS из фантастического фильма «Интерстеллар», чтобы проверить сможет ли настоящий робот с такой конструкцией передвигаться, как это показано в кино. Реальный робот TARS3D имеет массу около одного килограмма и состоит из четырех вращающихся вокруг общей оси блоков с телескопически выдвигающимися ступнями. Исследователи построили математические модели для двух вариантов передвижения: ходьбы и качения «колесом», после чего воспроизвели их на реальном роботе. Кроме этого, инженеры использовали обучение с подкреплением, чтобы найти другие возможные способы локомоции такой конструкции. Препринт опубликован на сайте arXiv.org.
Обычно при проектировании ходячих роботов инженеры опираются на морфологию живых прототипов: двуногих, четвероногих или шестиногих существ. Биомиметический подход доказал свою эффективность, позволив построить роботов, способных передвигаться по сложному пересеченному рельефу, как робособаки вроде ANYmal. Однако существует и другой путь — создание роботов, чья конструкция не имеет привычных биологических аналогов, как, например, в случае роботов-пылесосов или промышленных манипуляторов.
Одним из ярких примеров такого небиологического дизайна являются роботы TARS и CASE — персонажи фантастического фильма «Интерстеллар». В сложенном состоянии корпуса этих роботов выглядят как черный монолит, но на самом деле состоят из четырех соединенных между собой прямоугольных блоков, которые могут отклоняться и поворачиваться друг относительно друга. В фильме это позволяет роботам трансформироваться и передвигаться несколькими способами. К примеру, они могут ходить походкой, напоминающей двуногую, используя блоки как ноги, а также катиться. Во втором режиме все сегменты-блоки раскладываются, поворачиваясь вокруг центрального шарнира и образуя подобие спиц колеса без обода.
Необычные концепции из научной фантастики часто служат источником идей для инженеров. Вот и в этот раз робототехник из компании Nimble.ai Адитья Срипада (Aditya Sripada) вместе с выпускником Университета Карнеги — Меллона Абхишеком Варриером (Abhishek Warrier) взялись проверить, сможет ли реальный робот с конструкцией, как у TARS, передвигаться, как фильме. Они построили небольшой прототип TARS3D около 25 сантиметров высотой и массой около одного килограмма с корпусом из PLA-пластика.
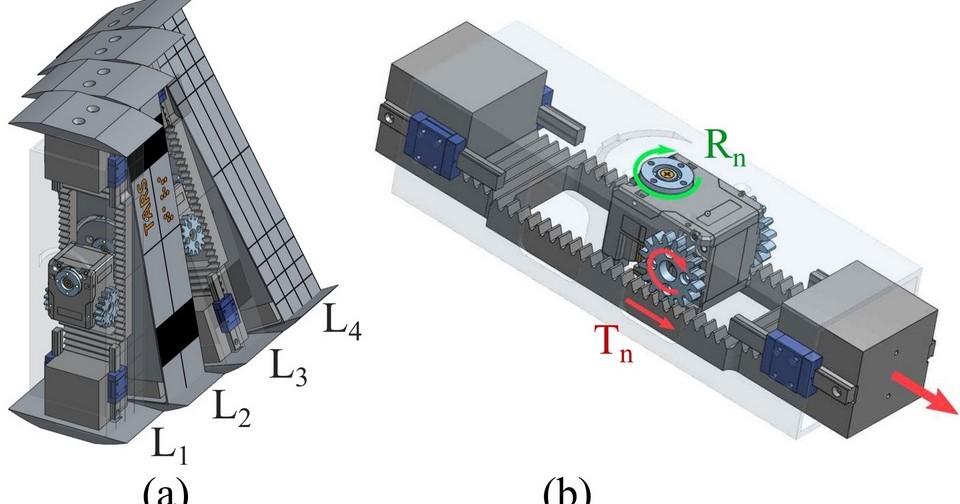
Робот состоит из четырех соединенных одной осью ног-блоков, каждая из которых имеет по два привода. Один отвечает за вращение ноги в суставе, а другой за работу телескопического механизма, изменяющего длину ноги. На конце каждой ноги находится ступня изогнутой формы, которая облегчает ходьбу и качение. Всего у робота восемь степеней свободы: четыре отвечают за телескопическое изменение длины, еще четыре — это вращение ног в «бедре».
Сначала исследователи аналитически описали два основных вида передвижения, показанных в фильме. Для модели ходьбы они использовали модель пассивного шагохода. Во время ходьбы внутренние и внешние ноги TARS3D движутся попарно синхронно. Для режима качения TARS3D отклоняет свои ноги так, чтобы они образовали конфигурацию, напоминающую колесо со спицами без обода. Переднюю и заднюю кромки каждой ступни можно рассматривать как концы четырех спиц, и каждые две из четырех ноги образуют колесо с восемью спицами. Режим качения TARS3D немного отличается от киношного прототипа: реальный робот катится не как единое целое, а поочередно переставляя левое и правое «колеса», при этом каждое из них за один шаг поворачивается на один сектор.
Кроме этого, инженеры попробовали поискать другие возможные для такой конструкции способы передвижения и использовали метод глубокого обучения с подкреплением. В результате агент в симуляции смог воспроизвести уже описанные аналитическим методом походки, а также научился новым движениям. Например, при помещении целевой точки в стороне от прямой линии, агент освоил асимметричную походку, при которой одна сторона тела робота остается почти неподвижной. Когда не получалось найти более эффективный способ движения, он научился совершать прыжки.
Авторы проекта планируют установить на робота бортовые аккумуляторов и системы связи, чтобы он стал автономным, интегрировать сенсоры IMU для оценки текущего состояния и разработать алгоритм переключения между различными режимами движения.
Использовать спицы колеса без обода в роли ног не новая идея. Например, в прошлом году ученые из Японии представили двухколесный вариант робота, который способен преодолевать неровности и взбираться по ступенькам.